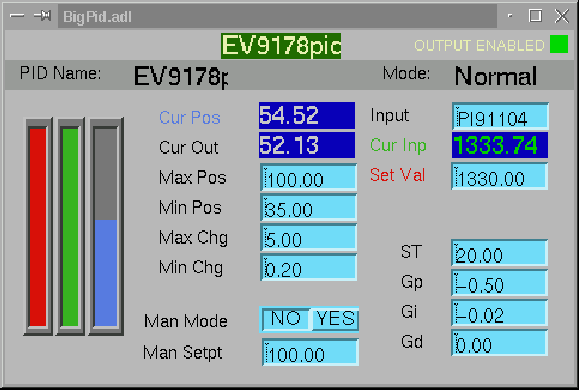
The user can set maximum and minimum positions for the valve, as well as the maximum change allowed in one Scan Time. If the PID calculates a change in valve position that is less than the Minimum Change, the PID does nothing. This minimizes wear and tear on the valve. A complete description of the PID settings is given below.
| Parameter | Description |
| PID Name | Specifies which valve is to be controlled by the PID loop |
| Mode | Either Normal (under PID control) or Manual |
| Cur Pos | The current value of valve position (in % open or # turns open) |
| Cur Out | The current output of the PID (ie where it thinks the valve should be) |
| Max Pos | Maximum valve position allowed by the PID loop (set by the user) |
| Min Pos | Minimum valve position allowed by the PID loop (set by the user) |
| Max Chg | Maximum that the valve position can change in one move (set by user) |
| Min Chg | Minimum that the valve position can change in one move (set by user) |
| Man Mode | NO selects PID mode, YES selects PID mode |
| Input | Selects which variable the PID loop will try to keep constant |
| Cur Inp | Current value of the Input variable |
| Set Val | Value (of the Input Variable) that the PID loop will try to maintain |
| ST | Scan Time for the PID loop in seconds |
| Gp | Proportional Gain setting |
| Gi | Integral gain setting |
| Gd | Differential gain setting |